人工智能在自动驾驶开发中的应用 核心技术与软件开发实践
引言
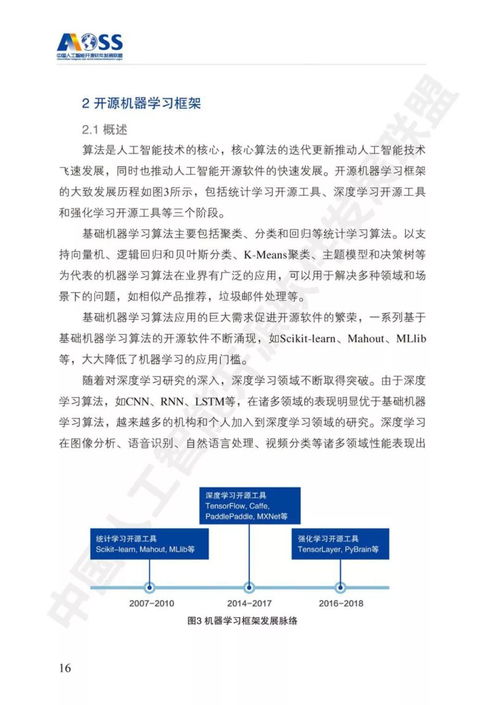
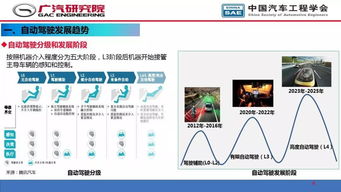
自动驾驶技术正以前所未有的速度重塑交通出行领域,而其核心驱动力,正是人工智能技术的深度应用。从环境感知、决策规划到控制执行,人工智能,尤其是深度学习、计算机视觉和强化学习,构成了自动驾驶系统的“大脑”和“眼睛”。本演示将系统阐述人工智能在自动驾驶开发中的关键应用,并聚焦于支撑这些应用的核心软件开发实践。
第一部分:人工智能在自动驾驶中的核心应用领域
- 环境感知与理解
- 计算机视觉:通过卷积神经网络处理摄像头图像,实现车道线检测、交通标志识别、行人及车辆检测(如YOLO、SSD等模型)。
- 多传感器融合:利用AI算法(如卡尔曼滤波及其神经网络变体)融合激光雷达、毫米波雷达和摄像头的数据,构建精确、鲁棒的3D环境模型,弥补单一传感器的不足。
- 语义分割与场景理解:对感知到的物体进行像素级分类,区分道路、天空、建筑物等,为决策系统提供丰富的语义信息。
- 决策与路径规划
- 行为预测:使用循环神经网络或图神经网络,预测周围车辆、行人的未来轨迹和意图,这是做出安全决策的前提。
- 决策制定:基于规则、概率模型或端到端强化学习,在复杂场景下(如无保护左转、拥堵汇入)做出跟车、换道、制动等决策。
- 运动规划:结合预测与决策,规划出一条安全、舒适且符合交通法规的平滑轨迹(常使用优化算法与机器学习结合)。
- 控制与执行
- 车辆控制:应用模型预测控制或深度学习控制器,精准地控制车辆的转向、油门和刹车,以跟踪规划好的轨迹。
第二部分:支撑AI应用的核心软件开发实践
- 数据驱动的开发范式
- 数据闭环:构建“数据采集-标注-模型训练-仿真测试-车端部署-真实路测-问题数据回收”的完整闭环,是AI模型持续迭代优化的生命线。
- 大规模数据管理与标注:开发高效的数据管理平台和(半)自动标注工具,处理PB级的多模态数据,是软件开发的基础设施挑战。
- 模型开发与部署
- 算法框架与工具链:广泛使用TensorFlow、PyTorch等框架进行模型研发,并利用ONNX等格式实现框架间转换。
- 模型优化与压缩:为满足车规级芯片的算力与功耗限制,必须进行模型剪枝、量化、知识蒸馏等优化,以提升推理效率。
- 车端推理引擎:开发或集成高性能推理引擎,将训练好的模型高效、稳定地部署到车载计算单元上。
- 仿真与测试验证
- 高保真仿真:构建包含复杂交通流、多样化天气和光照条件的虚拟仿真环境,用于进行大规模、高风险场景的算法测试,加速开发周期。
- 软件在环与硬件在环测试:在部署前,对感知、决策等算法模块进行 rigorous 的测试验证,确保功能安全与可靠性。
- 软件架构与中间件
- 模块化与松耦合:采用模块化设计,便于不同AI算法的独立更新与迭代。
- ROS/ROS2与AUTOSAR Adaptive:利用这些中间件标准,实现传感器、算法模块、控制系统之间的可靠通信与集成,是复杂系统软件开发的关键。
第三部分:挑战与未来展望
- 挑战:长尾场景的覆盖、AI决策的可解释性与安全性验证、高昂的研发与数据成本、车规级软硬件标准。
- 未来趋势:
- 端到端自动驾驶:探索从传感器输入直接到控制指令输出的更一体化AI模型。
- 大模型的应用:视觉大模型、多模态大模型有望提升系统的泛化能力和场景理解深度。
- 车路云协同:AI软件开发将延伸至云端和路侧,实现更智能的协同感知与决策。
###
人工智能不仅是自动驾驶的技术灵魂,也重塑了其软件开发的全流程。成功的自动驾驶开发,依赖于在核心AI算法与坚实、高效的软件工程实践之间取得平衡。随着AI技术的持续突破和软件工具的不断成熟,更安全、更智能的自动驾驶将成为现实。
如若转载,请注明出处:http://www.china-welfare.com/product/11.html
更新时间:2026-06-08 11:48:24